-
×
 Manual De La Teoría De La Comunicación: I. Primeras Explicaciones - Ediciones De La U
1 × $52.000
Manual De La Teoría De La Comunicación: I. Primeras Explicaciones - Ediciones De La U
1 × $52.000 -
×
 Netter Flashcards De Anatomia 4 Edicion / John T. Hansen / Elsevier
1 × $199.000
Netter Flashcards De Anatomia 4 Edicion / John T. Hansen / Elsevier
1 × $199.000 -
×
 Accesorios de Madera - Lexus
1 × $38.500
Accesorios de Madera - Lexus
1 × $38.500 -
×
 Re-evolucion En El Servicio / Gabriel Vallejo / Conecta
1 × $55.000
Re-evolucion En El Servicio / Gabriel Vallejo / Conecta
1 × $55.000 -
×
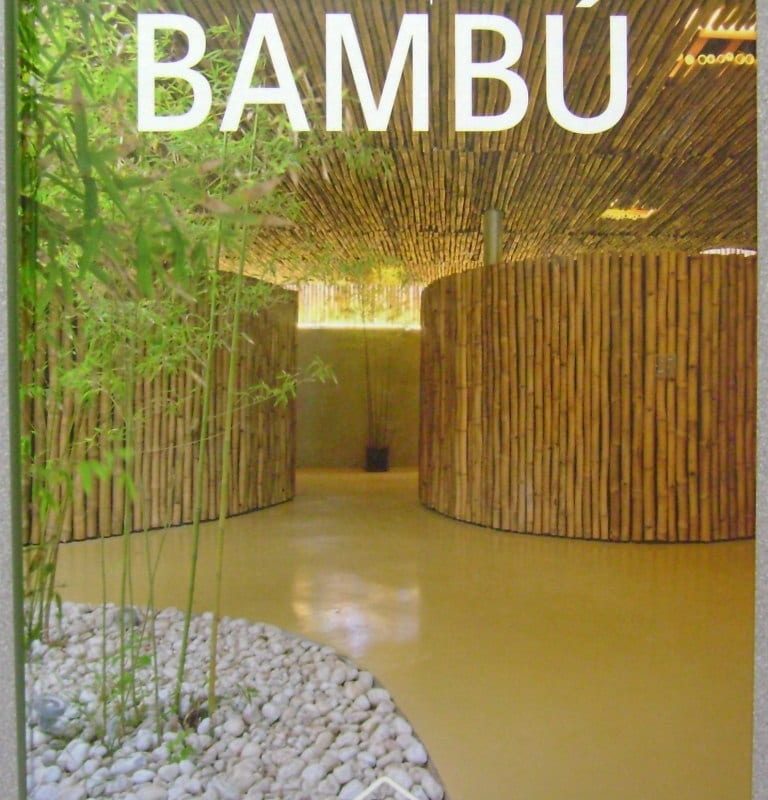 Materiales de Arquitectura Bambú / Lexus
1 × $119.000
Materiales de Arquitectura Bambú / Lexus
1 × $119.000 -
×
 Uml With Rational Rose 2002 - Wendy Boggs / Sybex
1 × $35.000
Uml With Rational Rose 2002 - Wendy Boggs / Sybex
1 × $35.000 -
×
 Oracle 12c Pl/sql / Muñoz Chaparro Antolin / Alfaomega
1 × $100.063
Oracle 12c Pl/sql / Muñoz Chaparro Antolin / Alfaomega
1 × $100.063 -
×
 Digital Vortex - Wade Louks Macaul - Ediciones De La U - Lid
1 × $58.800
Digital Vortex - Wade Louks Macaul - Ediciones De La U - Lid
1 × $58.800 -
×
 Hacking Práctico En Internet Y Redes De Ordenadores - Ediciones De La U
1 × $62.000
Hacking Práctico En Internet Y Redes De Ordenadores - Ediciones De La U
1 × $62.000 -
×
 Metodos De Estudio Y Lectura Integral 2 T + 2 Cd - Educar
1 × $180.000
Metodos De Estudio Y Lectura Integral 2 T + 2 Cd - Educar
1 × $180.000 -
×
 Aprendiendo las Tablas de Multiplicar / Ibalpe
1 × $109.000
Aprendiendo las Tablas de Multiplicar / Ibalpe
1 × $109.000 -
×
 Sueños Rojos (chasing Red 1) / Isabelle Ronin / Montena
1 × $65.000
Sueños Rojos (chasing Red 1) / Isabelle Ronin / Montena
1 × $65.000 -
×
 Historia del Arte Siglo XXI - Espasa
1 × $329.000
Historia del Arte Siglo XXI - Espasa
1 × $329.000
Subtotal: $1.402.363

There are no reviews yet.