-
×
 Innovar O Morir. Cómo Obtener Resultados Excepcionales Con Poca Inversión - Ediciones De La U
1 × $65.000
Innovar O Morir. Cómo Obtener Resultados Excepcionales Con Poca Inversión - Ediciones De La U
1 × $65.000 -
×
 Proyectos De Inversión Formulación Y Evaluación / Pearson
1 × $140.000
Proyectos De Inversión Formulación Y Evaluación / Pearson
1 × $140.000 -
×
 Urgencias en Oftalmología 4ED / Tuil - Elsevier
1 × $285.000
Urgencias en Oftalmología 4ED / Tuil - Elsevier
1 × $285.000 -
×
 Atlas De Técnicas Quirúrgicas Endocrinas - Duh Q - Elsevier
2 × $1.200.000
Atlas De Técnicas Quirúrgicas Endocrinas - Duh Q - Elsevier
2 × $1.200.000 -
×
 Digital Vortex - Wade Louks Macaul - Ediciones De La U - Lid
1 × $58.800
Digital Vortex - Wade Louks Macaul - Ediciones De La U - Lid
1 × $58.800 -
×
 Android. Desarrollo De Aplicaciones - Roberto Montero Miguel / De la U
1 × $52.000
Android. Desarrollo De Aplicaciones - Roberto Montero Miguel / De la U
1 × $52.000 -
×
 Atlas of Human Anatomy Netter 8a Edición - Elsevier
1 × $525.000
Atlas of Human Anatomy Netter 8a Edición - Elsevier
1 × $525.000 -
×
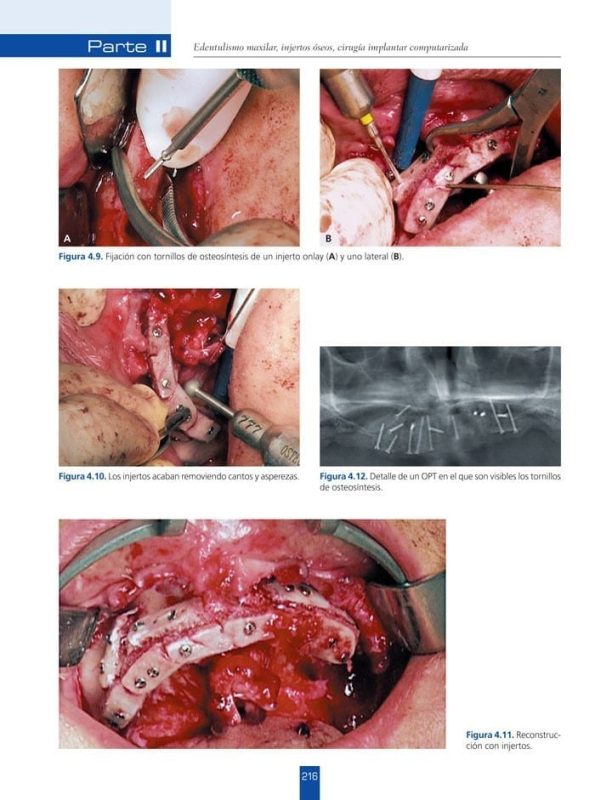 Manejo de Obstáculos Anatómicos en Cirugía Implantar / Marco Rinaldi - Angelo Mottola / AMOLCA
1 × $936.000
Manejo de Obstáculos Anatómicos en Cirugía Implantar / Marco Rinaldi - Angelo Mottola / AMOLCA
1 × $936.000 -
×
 Gráficas Y Tablas Estadísticas En Excel. Paso A Paso - Ecoe
1 × $29.000
Gráficas Y Tablas Estadísticas En Excel. Paso A Paso - Ecoe
1 × $29.000 -
×
 El Gran Libro del Vidrio - Lexus
1 × $70.000
El Gran Libro del Vidrio - Lexus
1 × $70.000
Subtotal: $4.560.800

There are no reviews yet.